AUTONOMOUS VEHICLE Navigation
In this project, I followed the online course (Introduction to Self-Driving Car) to develop an autonomous vehicle navigation algorithm in CARLA simulator utilizing PID control for lateral and longitudinal error correction to ensuring smooth and accurate navigation. A physics-based approach was employed to model vehicle dynamics, capturing the real-world effects of movement and control inputs.
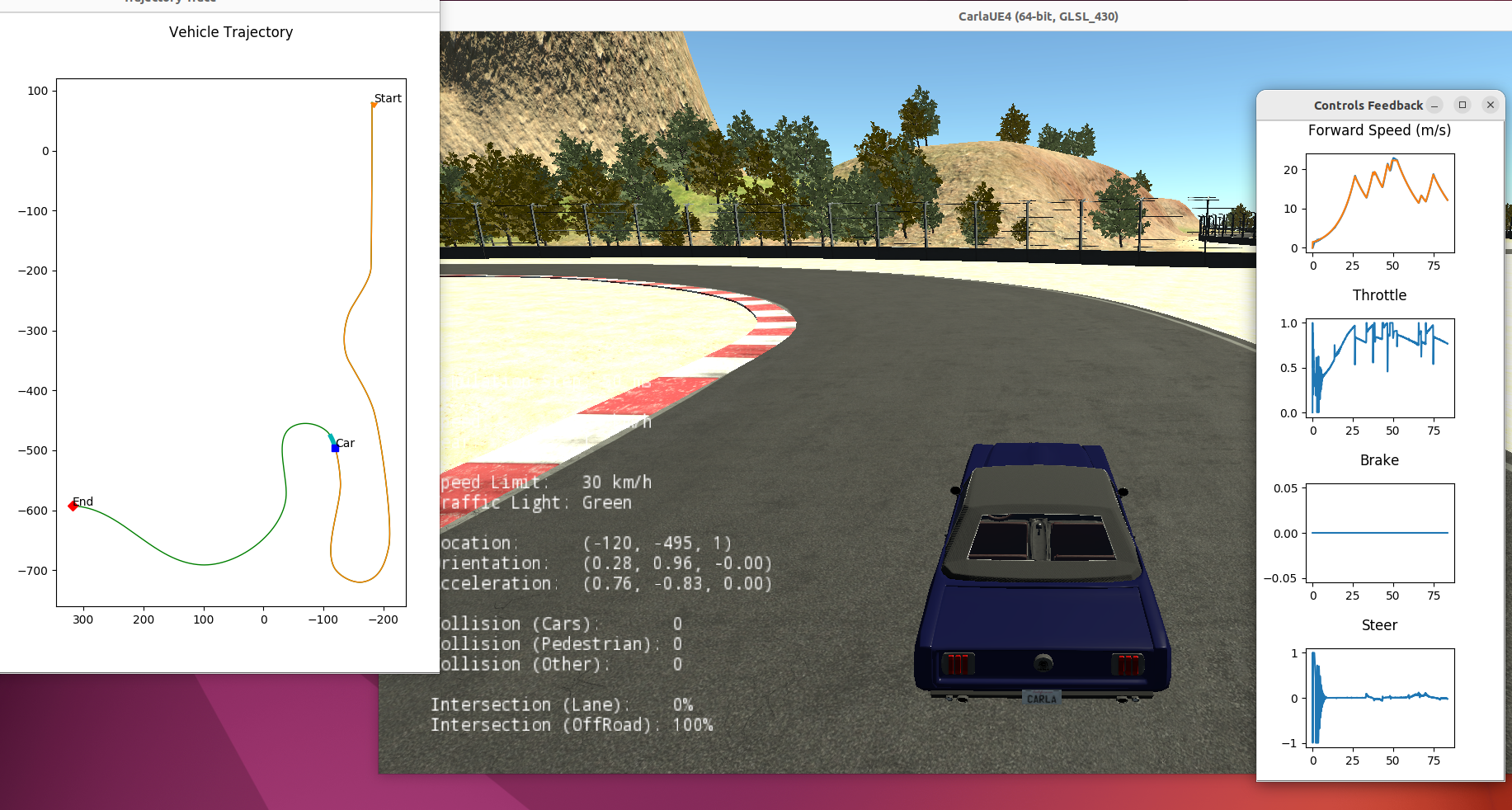
Snapshot of the racetrack simulation in CARLA
Below are visualizations from a final simulation run with a racetrack.
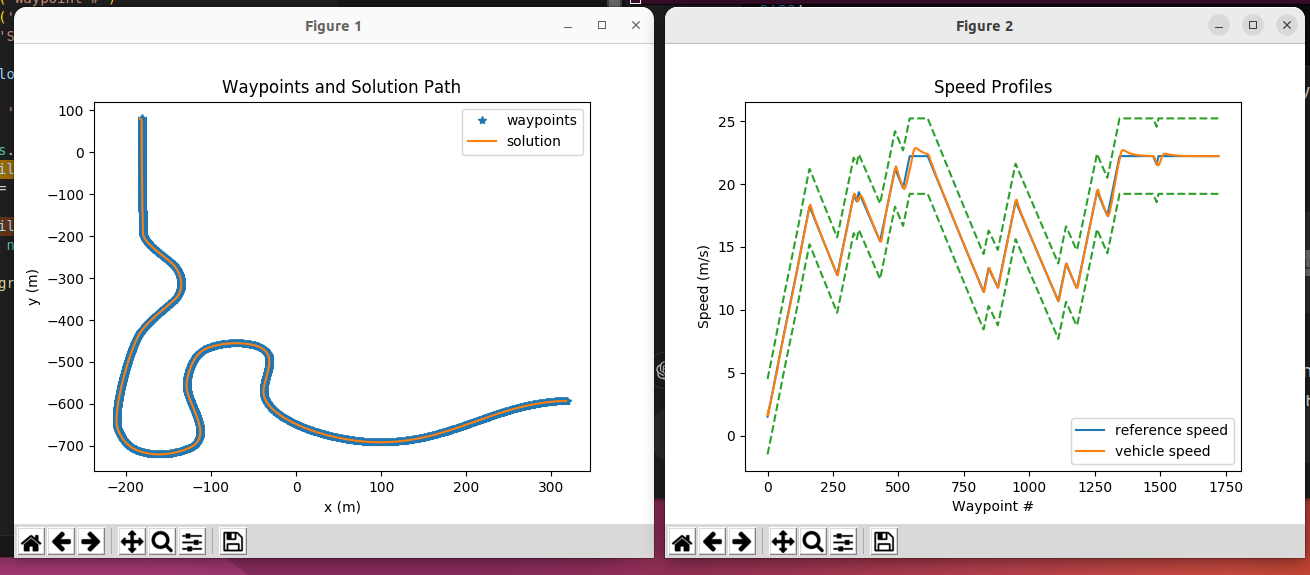
Comparing predicted v measured data for path and speed profile
LOOKING AHEAD
Implementing a collision warning system estimating a 3D drivable space, using semantic lane estimation, and object detection using semantic segmentation