team 6418: THE missfits (First robotics)
Team 6814: The MISSFITS is an all-girls community FRC team based in San Francisco. I was on the team for two years, as serving as the Co-President and Design and Fabrication Lead. I designed various subsystems and led all the fabrication in-house.
2022 RAPID REACT - EOS 2.0
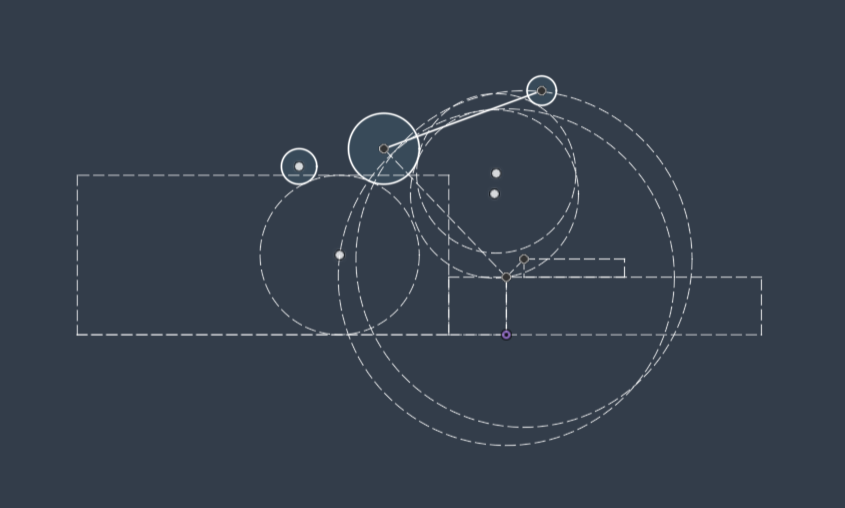
Sketch of Intake Geometry
The intake geometry was optimized using CAD to provide constant contact and compression during the intake of the spherical game piece. This pneumatic-driven roller intake uses mecanum wheels allowing wider contact and automatic centering of the game piece into the conveyor belt.

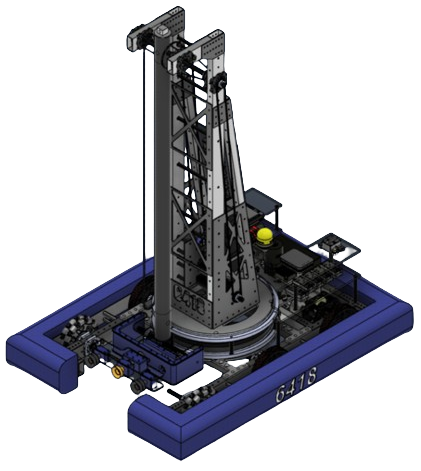
Two-Stage Telescope Climber
The telescope climber is spring loaded and controlled with a motor controller and gearbox. Once the robot has hooked onto a bar and in the air, lifting over 120lbs, the gearbox locks to counteract gravity. The telescoping mechanism allows for a compact design and speedier robot, lowering the robot's center of gravity.

Adjustable Shooting Hood
The adjustable hood allows the robot to shoot the game piece from any position on the playing field. The angle is controlled by a motor-driven geared path. The wheel type and size were chosen to account for friction and constant compression until the game piece is fully released.
2023 CHARGED UP - MEDUSA
The vacuum system allows suction of different shapes. To provide enough air into suction intake, a custom eight mini motorized pneumatic system was used.
The turret allows rotation of the arm without changing the orientation of our robot drivetrain.
The carbon fiber arm creates a pivot that reaches all three levels of nodes. This is a strong yet lightweight mechanism able to withstand a high torque when fully extended.
The electrical component placements were optimized to account for rotating mechanisms and motors in high places.